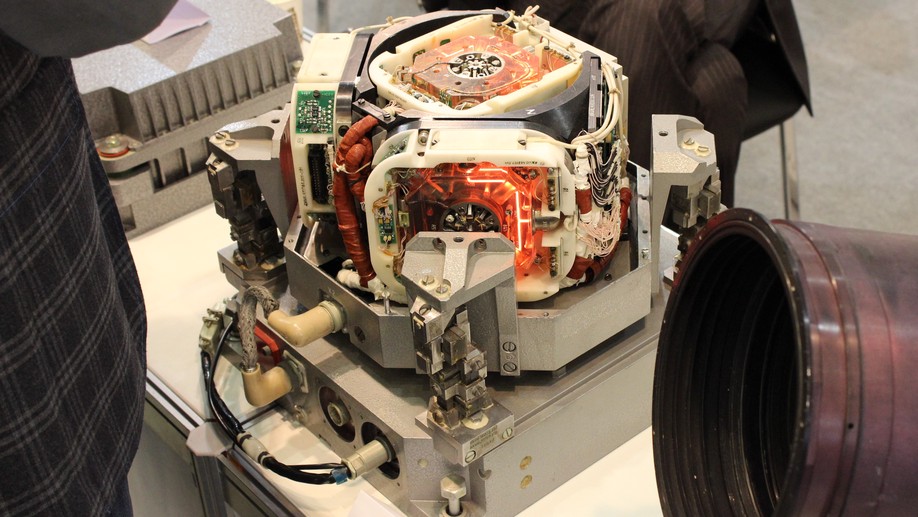
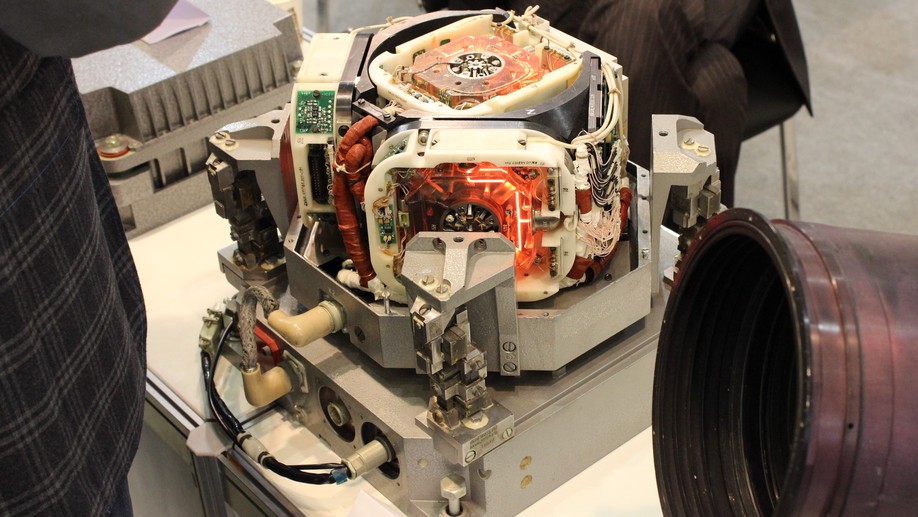
This project develops statistical methods and software for modeling the stochastic error structure of inertial sensors, GNSS receivers, and related navigation devices. The central goal is to move beyond ad hoc calibration rules by using wavelet-based representations of sensor noise, robust estimation, and principled model selection to identify error processes that can be used reliably in downstream navigation filters.
Much of this work is built around the generalized method of wavelet moments and its multivariate and multi-signal extensions. These methods use the scale-wise behavior of sensor errors to estimate latent stochastic models efficiently, even when several error sources are superposed or when the data contain outliers. The resulting tools are designed for practical calibration settings: low-cost MEMS IMUs, repeated calibration runs, redundant gyroscope configurations, vibration-contaminated measurements, and online calibration platforms.
The project also studies the limits of commonly used approaches. In particular, work on Allan variance-based regression clarifies when classical engineering procedures can be statistically inconsistent, while the later wavelet-based frameworks provide computationally efficient alternatives for automatic model identification, calibration, and uncertainty-aware signal reconstruction.
Selected related publications include:
- Automatic Identification and Calibration of Stochastic Parameters in Inertial Sensors
- An Algorithm for Automatic Inertial Sensors Calibration
- Theoretical Limitations of Allan Variance-based Regression for Time Series Model Estimation
- Wavelet-Based Improvements for Inertial Sensor Error Modeling
- A Computationally Efficient Framework for Automatic Inertial Sensor Calibration
- A Multisignal Wavelet Variance-Based Framework for Inertial Sensor Stochastic Error Modeling
- Multivariate Signal Modeling With Applications to Inertial Sensor Calibration
- Multi-Signal Approaches for Repeated Sampling Schemes in Inertial Sensor Calibration
- Accounting for Vibration Noise in Stochastic Measurement Errors of Inertial Sensors